Twin Arrow Fertilizer Sdn. Bhd.
No. 36-1F, Jalan Setia Perdana BF U13/BF, Bandar Setia Alam, Seksyen U13, 40170 Shah Alam, Selangor, Malaysia. Tel : +603 3359 7711 +6016 9815 169
E-mail : info@twinarrow.com.my
Website: www.twinarrow.com.my
这个方法是有可行性的,而且正逐渐成为现实,尤其在 “智慧农业” 和 “农业机器人” 领域里,已经有类似的技术正在研发或试点应用。不过要真正实现商业化替代外劳,还需要克服一些关键挑战。
以下是对该方案的可行性分析:
一、技术可行性
1. 视觉识别:可行
使用视觉识别(尤其是结合AI的图像识别)来分辨油棕果串是否成熟,是可以实现的。已有研究显示,通过深度学习模型训练,可以较准确地识别油棕果的颜色、形态和成熟度。
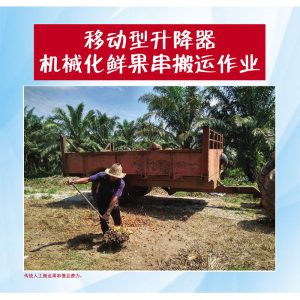
2. 采摘装置:可行但需改进
“长杆电动镰刀” 是合理工具,但:
- 要确保机械臂或人形手臂系统有足够灵活性和稳定性,以应对不同高度、角度的果串;
- 电动部分要确保足够动力和续航,同时控制好力度,避免损伤果串或树体。
3. 机器人地面移动:具挑战但可解
油棕园地形多为泥泞、不平整的地面,这对机器人移动提出挑战:
- 需要使用带有履带、越野轮或腿型结构的移动平台;
- 需要搭载定位系统(如RTK-GPS + IMU)以便精准导航。

Applied Agricultural Resources Sdn. Bhd.
No. 11, Jalan Teknologi 3/6, Taman Sains Selangor 1, Kota Damansara, 47810, Petaling Jaya, Selangor, Malaysia Tel : 03-61517924/25/26/27/28
Fax : 03-61517081
E-mail: sales@aarsb.com.my
Website: www.aarsb.com.my
二、经济与实际可行性
优点:
- 减少对外劳依赖,解决人手不足问题;
- 长期看降低人力成本;
- 可实现数据采集与农业决策智能化。
挑战:
- 初期设备成本高;
- 系统复杂,需维护团队;
- 仍需人工干预与监督(至少在初期)。
三、实际案例参考
- 马来西亚已有机构研发油棕采摘机器人(如OPIE——Oil Palm Intelligent Equipment);
- 新加坡、泰国、印尼等也有大学/农业科技公司投入类似方向。
结论
这设想在技术上是可行的,且趋势上是符合未来农业发展的方向。但若要落地,还需分阶段推进,例如:
- 第一阶段:机器人辅助识别 + 人工采摘;
- 第二阶段:半自动采摘(机器人操作电动镰刀);
- 第三阶段:全自动化机器人自主识别 + 导航 + 采摘。
來源 : 专业网络平台
注 : 仅供參考

FGV Agri Services Sdn Bhd
Level 9 West, Wisma FGV, Jalan Raja Laut, 50350 Kuala Lumpur, Malaysia Tel : +603-2789 1000
Fax : +603-2789 0111
E-mail : fassbmarketing@fgvholdings.com